自定义 Mavlink 消息

文章目录
MAVLink 是一个很轻量的应用层通信协议,最初是应用与无人机领域,目前已经在小型机器人无人车无人水下航行器等领域有所应用。本文主要是介绍如何生成自定义的 MAVLink 消息。
环境的准备
MAVLink tools 需要如下依赖:
- Python 2.7+ 或 Python 3.3+ :工具链是用 Python 写的
- Python future module:提供 Python 2⁄3 的兼容层
- (可选) Python TkInter module:GUI 工具
- (可选) 添加仓库到环境变量:可直接从命令行中调用;也可以 cd 到仓库目录
以 ArchLinux 为例简单说明下依赖的安装:
sudo pacman -S python-pip
pip install --user future
sudo pacman -S python-tk然后克隆 mavlink 仓库:
cd ~
git clone https://github.com/zt-luo/mavlink.git
git submodule update --init --recursive仓库的结构如下:
.
├── cmake
├── ...
├── doc
├── examples
│ └── linux
├── include
│ └── mavlink
├── mavgenerate.py
├── message_definitions
│ └── v1.0
│ ├── ardupilotmega.xml
│ ├── ASLUAV.xml
│ ├── autoquad.xml
│ ├── common.xml
│ ├── icarous.xml
│ ├── matrixpilot.xml
│ ├── minimal.xml
│ ├── paparazzi.xml
│ ├── python_array_test.xml
│ ├── slugs.xml
│ ├── standard.xml
│ ├── test.xml
│ ├── ualberta.xml
│ └── uAvionix.xml
├── pc.in
├── pymavlink
│ ├── generator
│ ├── ...
│ └── tools
│ ├── AccelSearch.py
│ ├── ...
│ ├── mavgen.py
│ └── sertotcp.py
├── README.md
└── scripts
├── format_xml.sh
├── test.sh
├── travis_update_generated_repos.sh
└── update_c_library.sh消息定义文件
MAVLink协议中的消息是由XML文件定义的。仓库中的 message_definitions 存放着官方的消息定义文件。每一个XML文件定义了一组受特定系统支持的消息,这每一组消息被称为一种“方言”。受大多数地面站软件和自动驾驶仪支持的消息集合在“common.xml”中定义。Ardupilot的“方言”定义在“ardupilotmega.xml”文件中。
MAVLink XML 语法规则如下:
<?xml version="1.0"?>
<mavlink>
<include>common.xml</include>
<include>other_dialect.xml</include>
<!-- NOTE: If the included file already contains a version tag,
remove the version tag here, else uncomment to enable. -->
<version>6</version>
<dialect>8</dialect>
<enums>
<!-- Enums are defined here (optional) -->
<enum name="NAME_OF_ENUM">
<entry value="1" name="NAME_OF_ENUM_ENTRY1"/>
<entry value="2" name="NAME_OF_ENUM_ENTRY2"/>
<entry value="3" name="NAME_OF_ENUM_ENTRY3"/>
</enum>
</enums>
<messages>
<!-- Messages are defined here (optional) -->
<message id="11065" name="DEPTH_HOLD">
<description>Hold desire depth.</description>
<field type="uint8_t" name="cmd">1 for enable, 0 for disable.</field>
<field type="float" name="depth" units="m">desire depth.</field>
</message>
</messages>
</mavlink>include:包含当前方言需要导入的基础方言,一般会包含 common.xml,现已允许多层嵌套
version:当前协议的版本,如果 include 的文件中包含版本信息则本文件应该去掉版本信息
dialect:标志特定方言的 ID
enums:当前方言定义的枚举类型
messages:当前方言定义的消息
添加自定义消息
补充现有通信协议
以 Ardupilot 的消息定义文件为例,如果想要添加自定义消息只需要在 “ardupilotmega.xml” 文件中添加消息即可。需要注意的是新添加的消息的 ID 和 name 不能和现有的消息重复,同时消息 ID 大于 255 的消息只支持 MAVLink 2。
一个添加自定义实例如下:
<!-- ARMs ArduSub messages -->
<message id="11065" name="DEPTH_HOLD">
<description>Hold desire depth.</description>
<field type="uint8_t" name="cmd">1 for enable, 0 for disable.</field>
<field type="float" name="depth" units="m">desire depth.</field>
</message>
<message id="11066" name="ATTITUDE_HOLD">
<description>Hold desire attitude.</description>
<field type="uint8_t" name="cmd">1 for enable, 0 for disable.</field>
<field type="float" name="yaw" units="degree">desire yaw.</field>
<field type="float" name="pitch" units="degree">desire pitch.</field>
<field type="float" name="roll" units="roll">desire roll.</field>
</message>编写你自己的“方言”
如果你想创建一个新的方言用于你自己的系统,那么只需要参考现 xml 文件的语法规则编写一个新的 xml 文件即可。
需要注意的是新建的 xml 文件需要放到 message_definitions/v1.0 文件夹中。
编译到具体语言
mavgenerate
可以使用 mavgenerate.py 工具生成指定的语言。
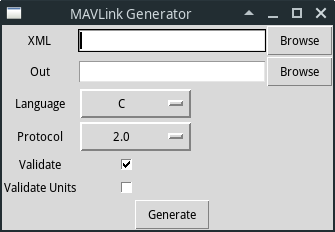
mavgenerate
mavgen
mavgenerate 只是一个 GUI 的包裹工具,其后端是 mavgen。mavgen 是一个命令行的工具,位于 pymavlink/tools/mavgen.py。其使用方法可以参考这里。
# 显示帮助信息
./pymavlink/tools/mavgen.py -hupdate_c_library
由于我做自定义的消息的时候的主要目的是用于 Ardupilot 的开发,所以为了方便我直接使用 scripts/update_c_library.sh 脚本生成 c 语言的版本并且自动同步到 github 的仓库。update_c_library 同样使用 mavgen 作为后端。
./scripts/update_c_library.sh 2 # MAVLink 2
./scripts/update_c_library.sh 1 # MAVLink 1参考
MAVLink Developer Guide
MAVLink XML File Schema / Format
Generating MAVLink Libraries