搭建 Pixhawk 飞控固件编译环境

文章目录
【注意】最后更新于 December 19, 2018,文中内容可能已过时,请谨慎使用。
ArduSub 官方的程序无法直接给电机发送指令,这个功能需要自己实现。为了实现这个功能首先需要搭建 Pixhawk 的编译环境。 下面将简要介绍一下环境的搭建步骤。
一、前言
Pixhawk1(px4_v2) 飞控使用了两片单片机。Pixhawk 其实是 PX4FMU 与 PX4IO 两块板子的组合,其中PX4FMU 使用的单片机是 STM32F427 ,PX4IO 使用的单片机是 STM32F100。PX4FMU 负责复杂的浮点运算,PX4IO 负责将 PX4FMU 计算得到的控制量输出为 PWM 或 其他信号。
官方支持的是 gcc-arm-none-eabi 编译器,使用的编译管理系统的是 Waf,Waf 依赖 Python,mavlink 的代码的生成也依赖 Python ,除此以外 Pixhawk1 上运行着 NuttX RTOS,Pixhawk1 固件的生成依赖 PX4Firmware。
官方支持的编译环境包括一下几个:Linux/Ubuntu、Windows、Windows10 WSL、Windows Cygwin、MacOSX。目前使用的 Windows10 系统,电脑性能较差虚拟机暂不考虑,双系统切换麻烦 暂不考虑。官方提供的 Windows 编译环境使用的是一个较老版本的 msys 性能较差 不考虑。Cygwin 包的配置需要一个一个的安装非常费劲同时性能也很差 不考虑。那么现在只剩下一个选项 Windows10 WSL。之前也使用过一段时间的 Windows10 WSL 但是后来还是转投了 msys2 的阵营,主要原因是最初 WSL 与 Windows10 文件系统的交互较差,只能从 WSL 中访问 Windows10 的文件,无法从 Windows10 中访问 WSL 里的文件,有时这是一个非常恼人的特性。最近发现可以直接从 Windows10 中访问 WSL 的文件系统,我又欢快地从 msys2 转投了 WSl 阵营。另外,提一下完整编译的时间,使用 msys 的情况下我的电脑需要一个半小时,使用 WSL 可以缩短为半个小时,可以说性能提高很明显了。
官方提供的配置教程其实足够详细了,但是教程中只提到了使用 Ubuntu 16.04 LTS 的情况下的配置, 没有提 Ubuntu 18.04 LTS 的配置,也没有提 nijia 的安装。
二、编译环境配置
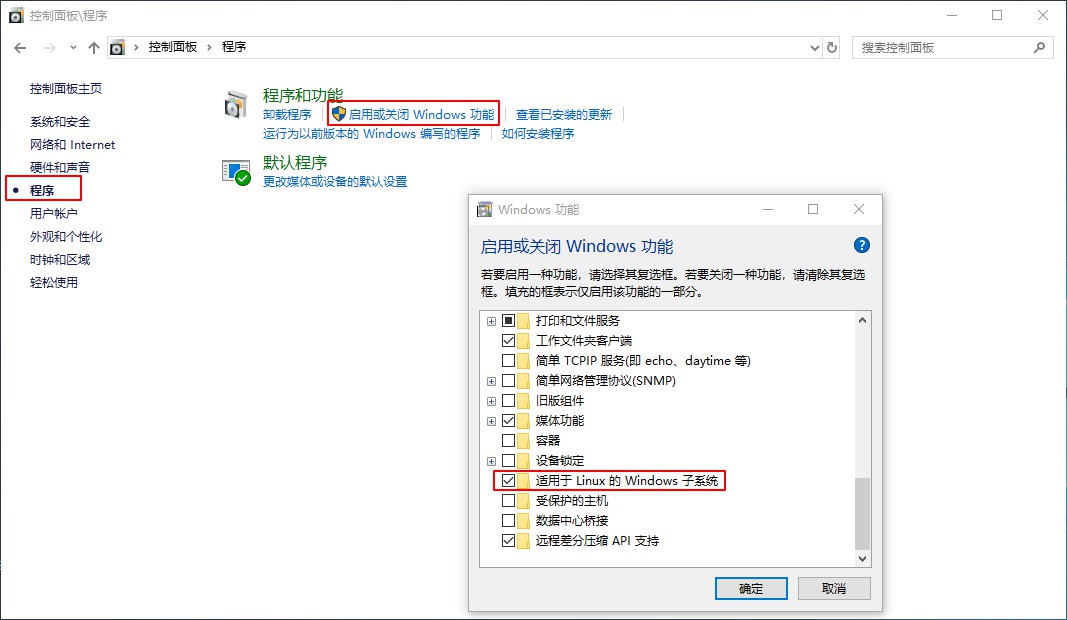
1、启用 WSL
这一步很简单,直接上图。
enable WSL
2、安装 Ubuntu 应用
如果为了省时省力可以直接安装 Ubuntu 16.04 LTS ,现在是2018 年下半年了,为了使用新版本的程序我选择 Ubuntu 18.04 LTS 。安装时可以直接点击上面链接也可以打开 Microsoft Store 搜索 Ubuntu 选择合适的版本下载即可。
Ubuntu 18.04 LTS 上自带的是版本号 6.3 的 gcc-arm-none-eabi ,编译环境只支持 4.9 和 5.4。ARM 官方 4.9 和 5.4 只有 32位版本的,自行编译太过麻烦。
注:商店中没有标明版本号的 Ubuntu 应用默认安装的是最新的 LTS 版本,如果时之前安装的Ubuntu 应用,现在有了新的 LTS 版本,可以通过 do-release-upgrade 命令升级 LTS版本号。Ubuntu LTS 的服务支持的时间是 5 年。
3、初始化 Ubuntu
打开安装的 Ubuntu 应用,或者当系统中只安装了一个 WSL 应用时,可以直接输入 bash 启动那个唯一的 WSL。需要注意的是 *inux 系统输入密码时不会显示已输入的字符的数量。
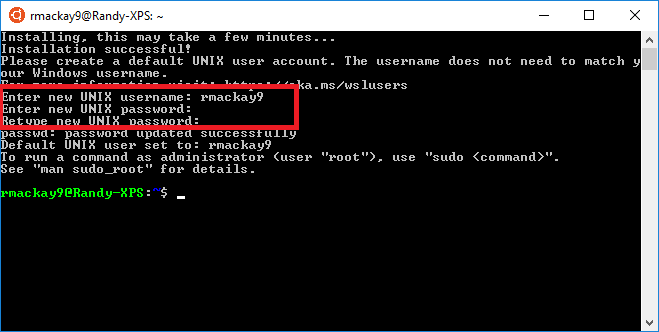
WSL init
初始化完成后,为了提高安装软件包的速度,需要将 Ubuntu 的软件源替换成国内速度较快的软件源,这里推荐使用网易的源。
# 用 nano 打开镜像源列表文件
sudo nano /etc/apt/sources.list
# 注释掉所有官方的源
# 复制对应版本号的源到文件的最下方
# Ctrl + x 关闭并保存文件
# 更新软件列表、更新软件
sudo apt-get update
sudo apt-get upgradeUbuntu 16.04 LTS 源:
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.163.com/ubuntu/ xenial main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ xenial main restricted universe multiverse
deb https://mirrors.163.com/ubuntu/ xenial-updates main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ xenial-updates main restricted universe multiverse
deb https://mirrors.163.com/ubuntu/ xenial-backports main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ xenial-backports main restricted universe multiverse
deb https://mirrors.163.com/ubuntu/ xenial-security main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ xenial-security main restricted universe multiverse
# 预发布软件源,不建议启用
# deb https://mirrors.163.com/ubuntu/ xenial-proposed main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ xenial-proposed main restricted universe multiverseUbuntu 18.04 LTS 源:
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.163.com/ubuntu/ bionic main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ bionic main restricted universe multiverse
deb https://mirrors.163.com/ubuntu/ bionic-updates main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ bionic-updates main restricted universe multiverse
deb https://mirrors.163.com/ubuntu/ bionic-backports main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ bionic-backports main restricted universe multiverse
deb https://mirrors.163.com/ubuntu/ bionic-security main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ bionic-security main restricted universe multiverse
# 预发布软件源,不建议启用
# deb https://mirrors.163.com/ubuntu/ bionic-proposed main restricted universe multiverse
# deb-src https://mirrors.163.com/ubuntu/ bionic-proposed main restricted universe multiverse4、克隆 Ardupilot 代码库到本地
git clone https://github.com/ardupilot/ardupilot.git
cd ardupilot
git submodule init
git submodule update --recursive5、进行环境设置
首先运行脚本,准备好大部分的环境。
./Tools/scripts/install-prereqs-ubuntu.sh # 安装软件时将需要账号密码
# 若是 WSL 默认的纯净环境这一步需要下载接近 300M 的软件包,安装后占用 1.3G 的空间
nano ~/.profile
# 删除下面这行,如果有的话, ctrl + x 保存关闭
# export PATH=/opt/gcc-arm-none-eabi-4_9-2015q3/bin:$PATH脚本下载的是32位的 gcc-arm-none-eabi ,版本号 4_9-2015q3,解压的目录位置是 /opt/gcc-arm-none-eabi-4_9-2015q3/ ,我们的 WSL 是64位的,需要下载 64 位的 gcc-arm-none-eabi ,解压的文件可以直接删除。
sudo rm -rf /opt/gcc-arm-none-eabi-4_9-2015q3
sudo apt-get install gcc-arm-none-eabi
source ~/.profile接下来安装 Ninja 构建系统。 Ninja 比 Make 更快,并且 PX4 的CMake 生成器官方支持 Ninja。不幸的是,Ubuntu 目前只支持一个非常过时的版本(Ubuntu 16.04 LTS)。下载二进制文件并添加到系统路径来安装最新版本的 Ninja:
mkdir -p $HOME/ninja
cd $HOME/ninja
wget https://github.com/martine/ninja/releases/download/v1.8.2/ninja-linux.zip
# 最新版本是 v1.8.2,
unzip ninja-linux.zip
rm ninja-linux.zip
exportline="export PATH=$HOME/ninja:\$PATH"
if grep -Fxq "$exportline" ~/.profile; then echo nothing to do ; else echo $exportline >> ~/.profile; fi
. ~/.profile6、进行编译
git fetch --tags
git checkout ArduSub-stable
git submodule update --recursive
./waf configure --board px4-v2
./waf build sub
# 编译并下载程序到飞控,注意 WSL 不支持这么做
./waf --upload sub7、下载程序
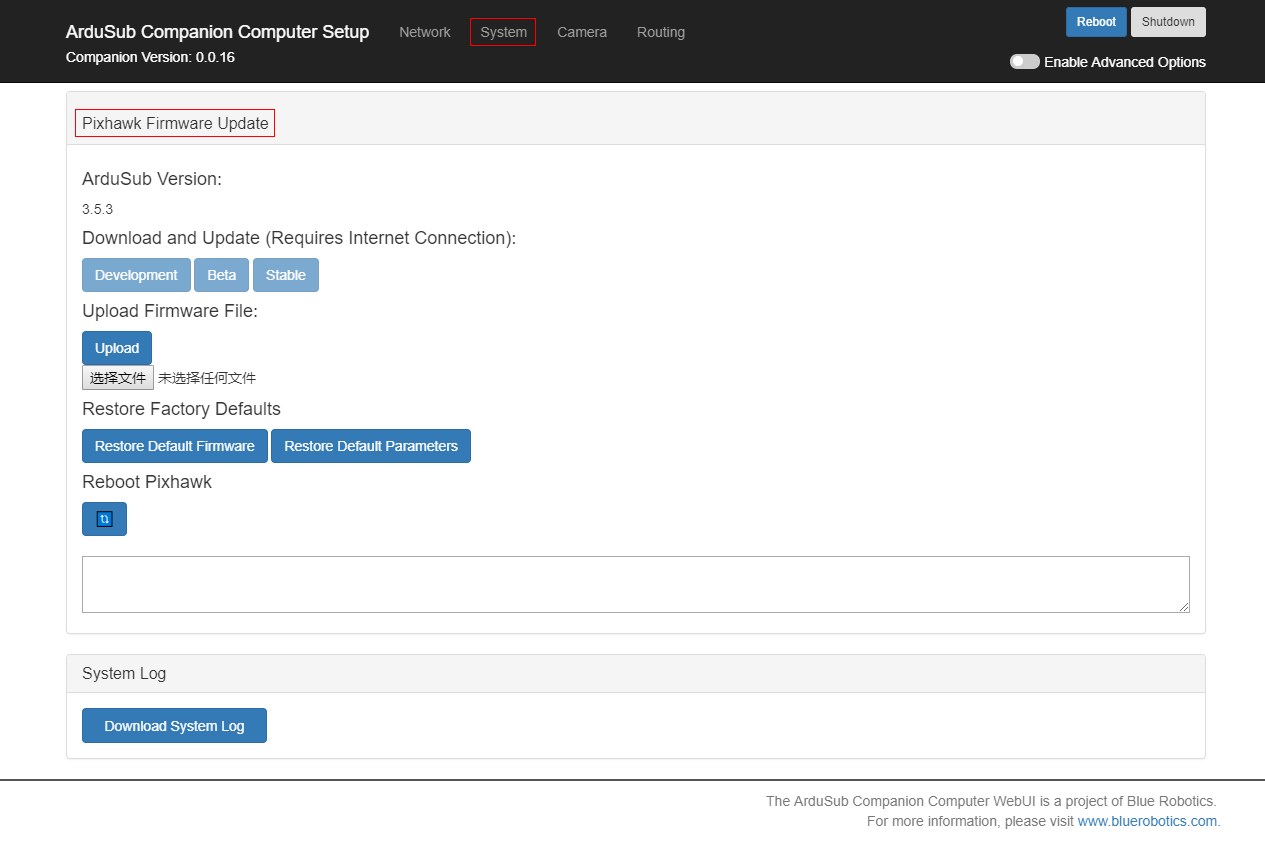
下载程序需要使用 QGroundControl 或者 ArduSub Companion Web Interface。操作方法见如下两图。
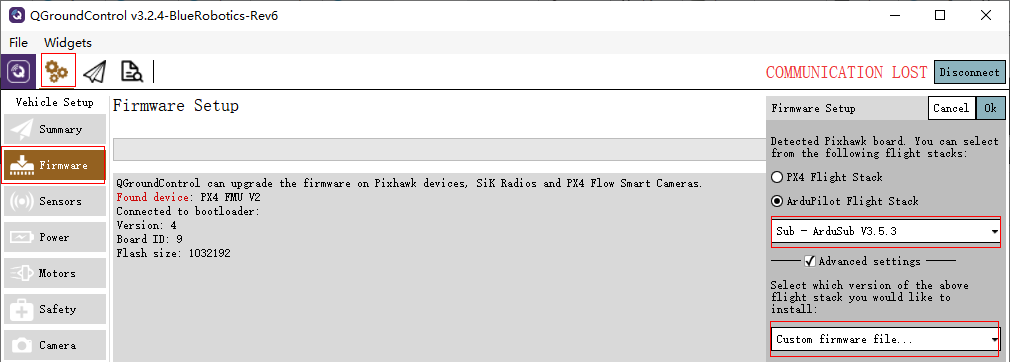
QGroundControl Firmware Setup