SeaDrone 硬件构成
 次阅读
次阅读
文章目录
ROV 因为固件升级出错需要拆机恢复固件,趁此机会把硬件结构摸了一下。
一、结构
通过拆解发现,SeaDrone结构较为简单,拆卸方便。密闭舱的拆卸只需拆下一个螺栓。密封舱的盖子和机体的密封通过两个密封圈来实现。小密封圈容易在拆卸的时候与盖子粘到一起,拆卸时要注意。大密封圈在机体密封接触面的外侧。

整体视图
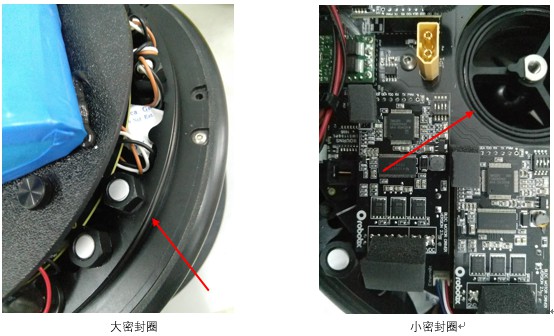
密封圈
二、主控
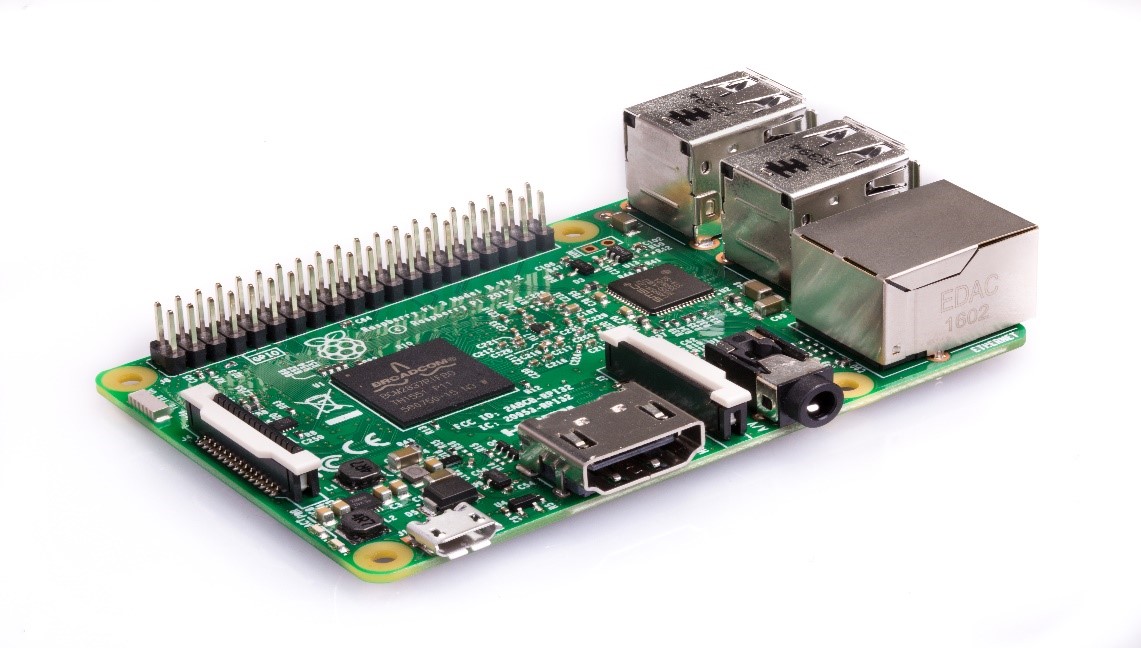
主控板是Raspberry Pi 3 Model B,内部运行Raspbian Linux 。其登陆用户名和密码为:username: pi ,password: seadrone。通过SSH登陆之后可以获得root 权限。进而可以安装软件编写运行自己的软件,可以用这种方式通过以太网与上位机通信,不依赖ROV固件。目前,树莓派上还有三个空余的USB口(可接HUB扩展,串口转USB等方式扩展通讯接口)。
树莓派

树莓派
三、电机驱动及传感器
1. 电机驱动
共有5块电机驱动,电机驱动的主控为TI的TMS320系列32位DSP。电机驱动与主控板的通讯方式为串口(两线,RX和TX),电平电压3.3v,波特率921600。官方上的Github上有个开源的电机驱动api,用来通过树莓派控制电机和获取各种相关信息(转速、电流、电压、温度、警报)。可以通过一个串口同时控制最多16个电机。四位拨码开关可以设置电机驱动的ID,0x00 – 0x0F,共16个。发送信息时带一个ID,只有对应ID的驱动才会响应对应的信息。
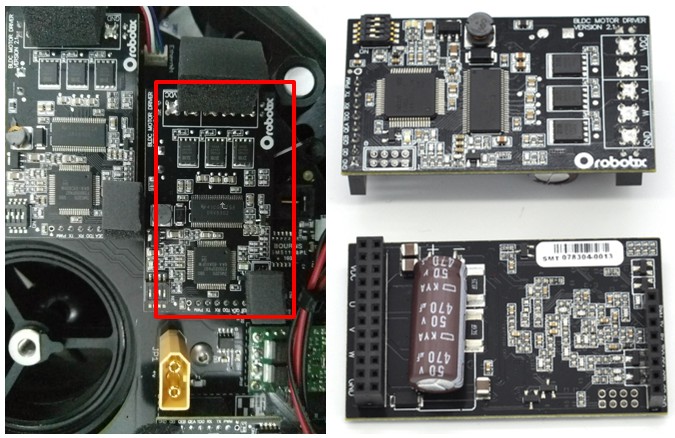
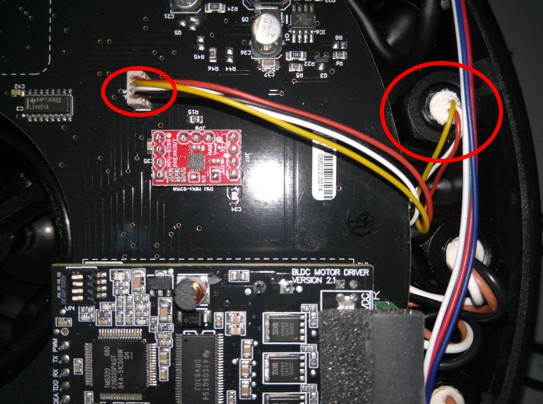
电机驱动
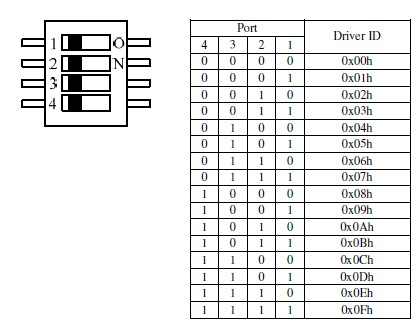
电机驱动拨码
2. IMU
IMU使用的是MPU9250,与树莓派的通信接口应该是I2C。MPU9250包含三轴加速度计、三轴陀螺仪、三轴磁力计,可以实现AHRS。
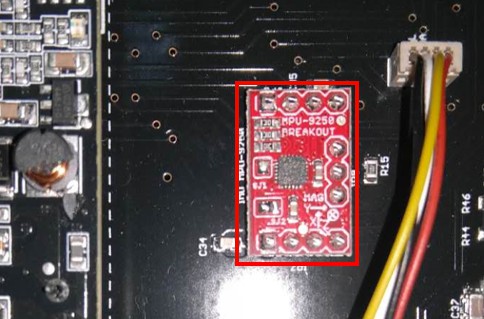
IMU
3. 摄像头
摄像头包括两部分:一是图像数据的传输,通过USB接口直接与树莓派相连;二是摄像头的转动,应该是类似一个舵机,使用PWM的方式控制。
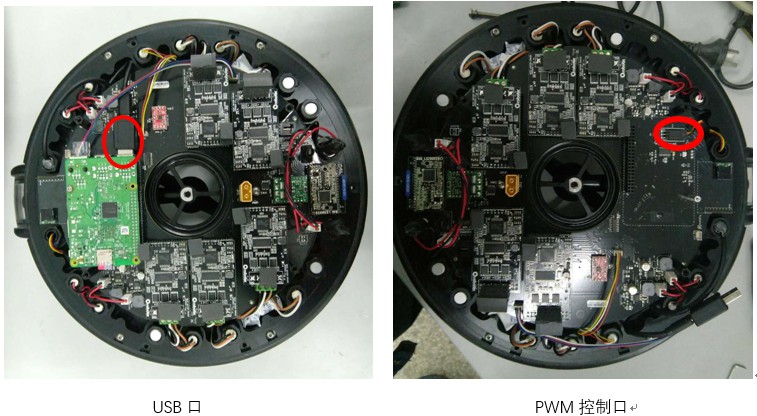
摄像头
4. 磁开关
磁开关控制电源的方式没有关注,下次拆解可以关注一下。
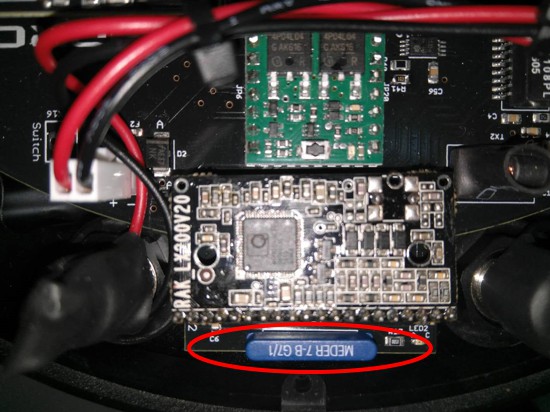
磁开关
5. 深度传感器
深度传感器是一个压力传感器,通过穿舱口直接与水接触。通信方式I2C。芯片型号为MS5837-30BA,最高压力为30bar(300m),分辨率0.2bar(2mm)。供电电压3.3v-5.5v。四线两根供电两根通信(SDA、SCL)。价格参考淘宝:100元人民币。
深度传感器
6. 温度传感器
未找到。
四、通舱口
机体上大概预留了5个可以实现通舱的口,与商家沟通后确认可以提供配套电缆实现自由扩展。

通舱螺栓
五、以太网通信的实现
树莓派中以太网经过载波通信模块的转换,变为两线制信号,通过电缆传到岸上控制盒,岸上控制盒再经过载波通信模块由两线制信号转换为以太网信号。以太网再通过无线路由器的交换机功能与热点功能组成局域网。所有的通信便通过这个局域网进行。
岸上缆绳控制盒由三部分组成:载波通信转换模块、Buck升压电路、路由器。路由器供电电压为12V,Buck电路将5v充电宝电压升为12v后为路由器供电。
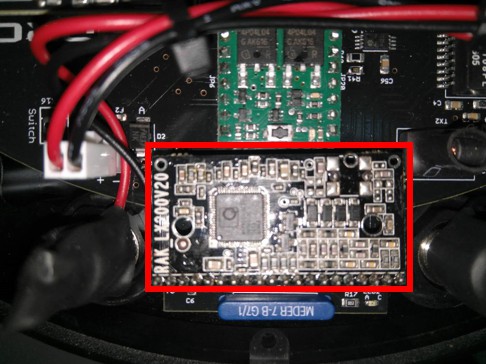
载波通信模块
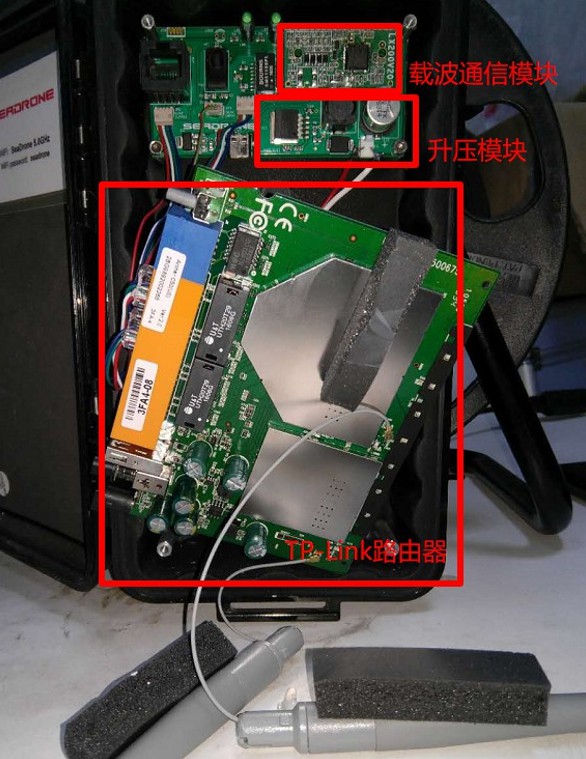
岸上控制盒
控制数据通过UDP通信传输。
视频数据的传输:树莓派安装了一个名为mjpg-streamer 的插件来实现。相当于在树莓派上建立了一个HTTP服务器,用来传输视频信号。
基于这个局域网,我们可以编写自己的程序与岸上设备通信,无需依赖ROV固件程序,也不会与原有的程序发生冲突。
六、供电方案
电池电压29v左右,8x3.7=29.6,可能是16节18650两两并联最后串联组成电池组。目前已知的内部电压至少有5v和3.3v。
